Experimenting with Robotic Softness, Machinic Sense & Sensibility: Dispositifs of Sensory Augmentation @ ISEA2020
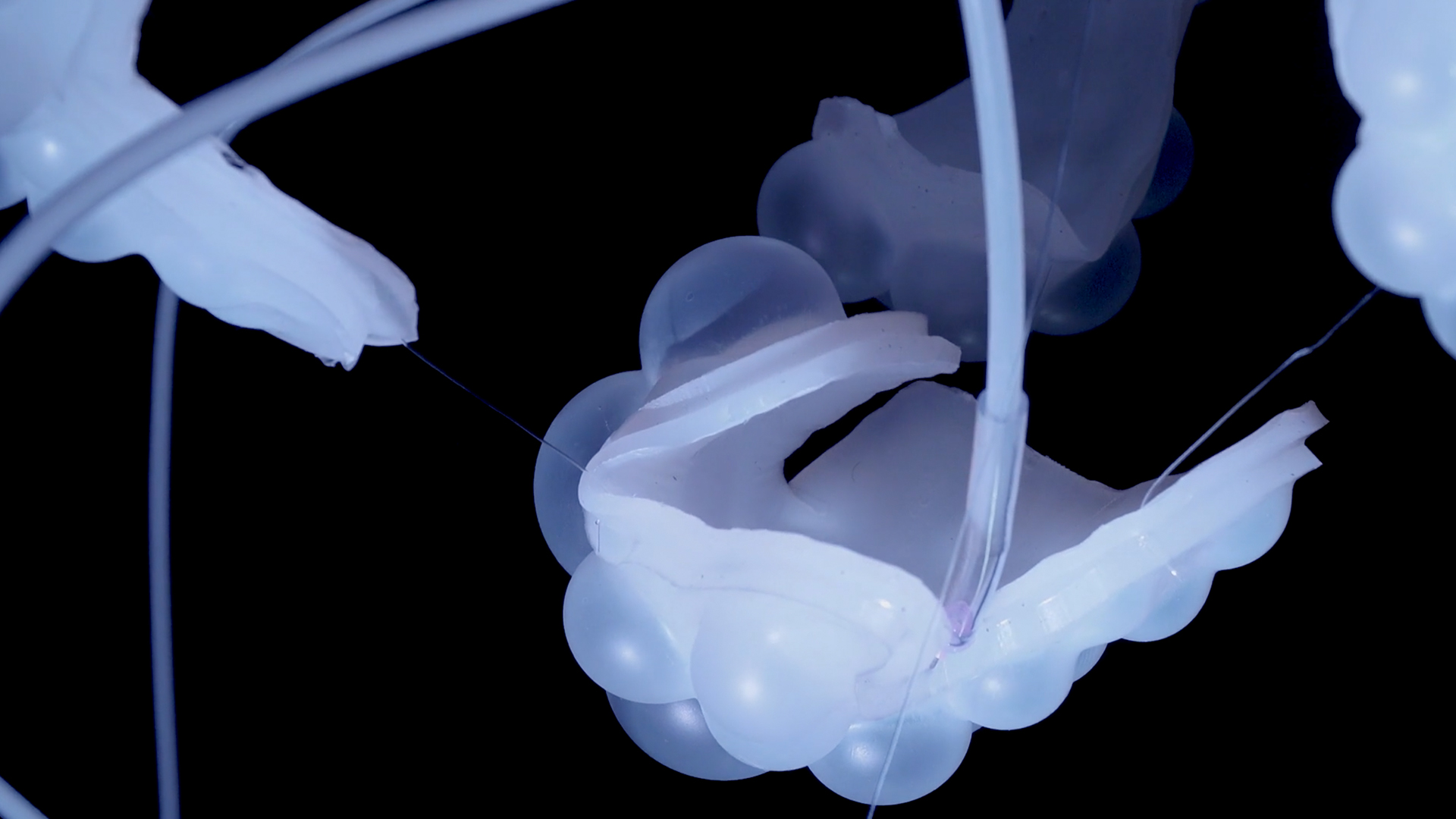
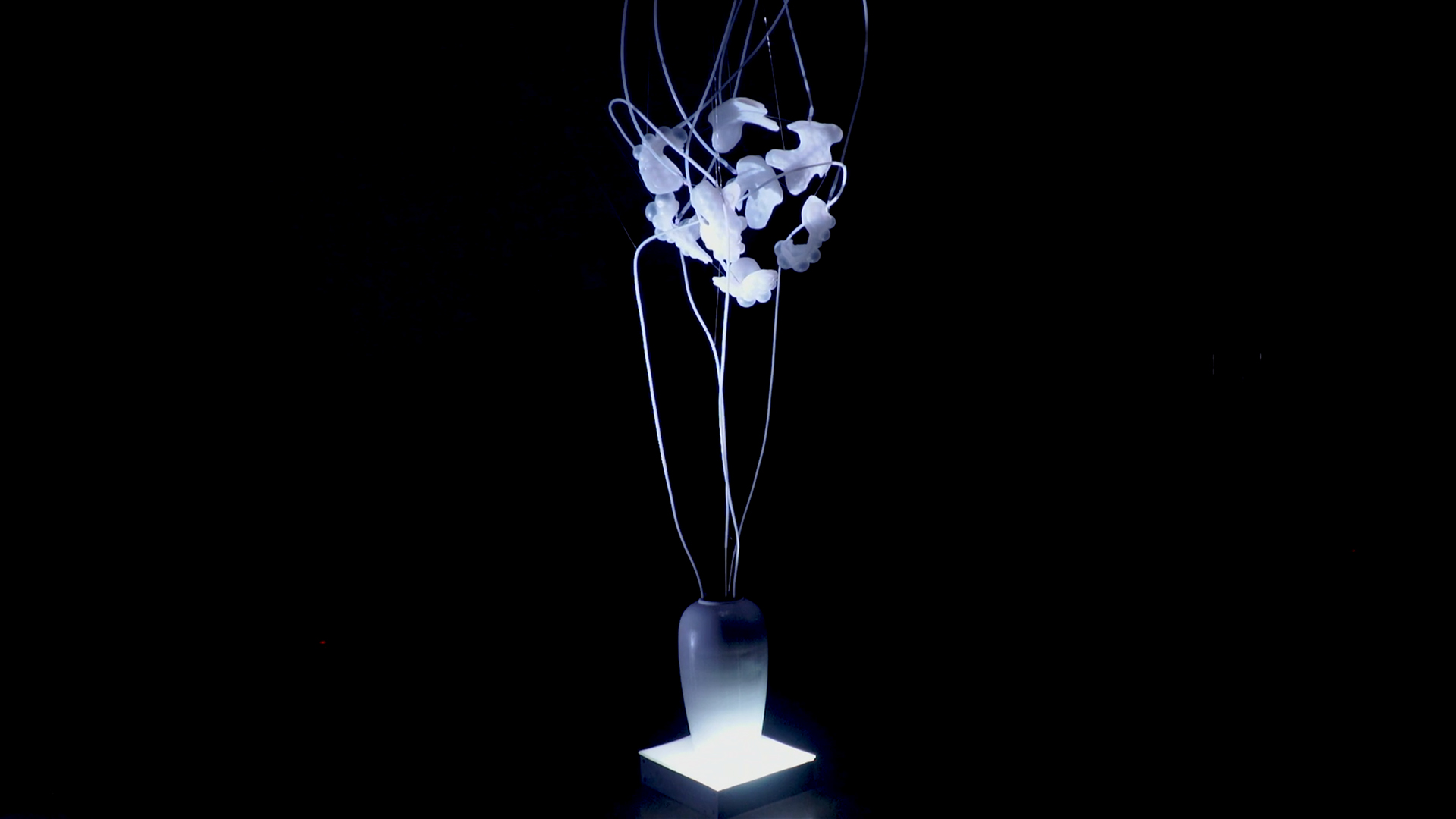
This paper presents Pero sans Cimon, a dynamic sculpture that critiques female body use and identity through the medium of soft robotics – a domain of robotics that uses materials and actuation mechanisms that mimic biological structures. Existing soft robotics research emphasizes the practical affordances of soft robotic mechanisms for locomotion, manipulation, wearable technology, and architecture. Instead, our objective is to examine soft robotics as an aesthetic medium through the analysis of the Pero sans Cimon artwork.
We use Andreas Broeckmann’s five aspects of the aesthetics of the machine: associative, symbolic, formalist, kinetic, and automatic to demonstrate how soft robotics, in continuity with twentieth-century machine art, can enable artistic expressiveness. Furthermore, we extend these principles by describing how the formalist and kinetic properties of soft robotics support new forms of artistic representation. We conclude by discussing the artistic implications of this technology. Specifically, we examine the potential social symbolism that may emerge from a robotic medium developed primarily for its aesthetic and mechanical resemblances to the human body.
a collaboration with
Sam Bourgault
Presentation
ISEA2020: 26th International Symposium on Electronic Art @ Online
October 2020



THANKS!